
Mobiles are by their nature the most joyous, playful sculptural genre. They embody the fantasies of flight and weightlessness, they live in a state of changing, moving balance, and they live “up there” in the light, above the world of “grounded reality”. They are inherently fanciful and alluring. I believe the mobile an ideal format in which to provide a message of hope, and a suggestion for a better future.

The great shortcoming of large-scale mobiles is that they tend to not move! Kind of a contradiction, but the fact is that most mobiles live indoors, where wind is scarce, and outdoors they are inherently too ponderous to move freely. The mobiles I'm developing, while relatively large - 3-8 meters – are ultra-lightweight such that they move quite easily. I’ve been gathering high-strength aluminum tubing from hang-gliders, and sourcing super-efficient DC motors, some of which are the same ones used in the Mars Rover. This is necessary in order to use the relatively low amount of electricity available with indoor solar, which has a fraction the energy of broad daylight. Solar is a perfect way to power a mobile, as the nodes of the mobile do not require any hardwired connection to an external power source, freeing them to move and spin around as they please.
I'm learning about robotics programming, to drive the articulation of parts of the mobile, and to control motor-driven propellers, enabling the pieces to fly themselves around in unexpected ways. Eventually, wireless technology such as Bluetooth will allow different sections of the mobile to communicate with one another, or with other mobiles, to coordinate motion activities. The application of “intelligence” is what really perfects the concept of the solar-powered mobile, and hopefully our world is cultivating the intelligence to embrace solar energy on a grand scale.
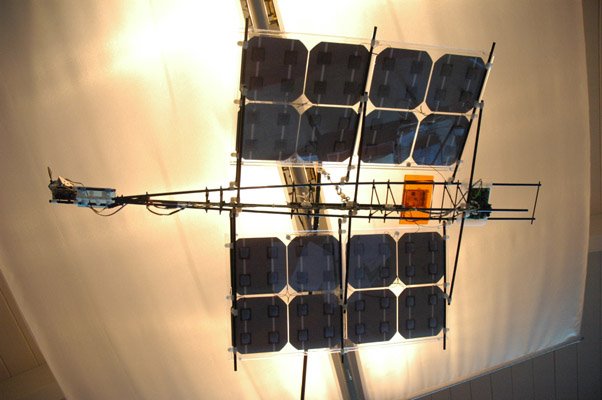
Here are some images of the prototype I'm just finishing. It's made of carbon fiber, mono-crystalline silicon solar cells, a power supply I designed to accumulate the solar energy, and a microcontroller using a "BASIC Stamp" board. The larger piece with the dual-servo "pan/tilt" head intermittently builds up energy, and the computer controls when and what to do with it. The smaller piece goes around non-stop, like the energizer bunny...
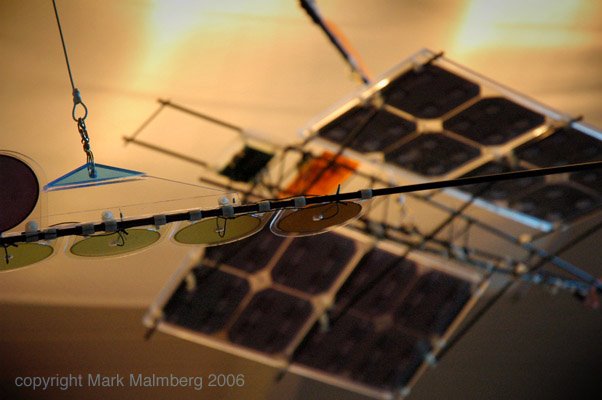
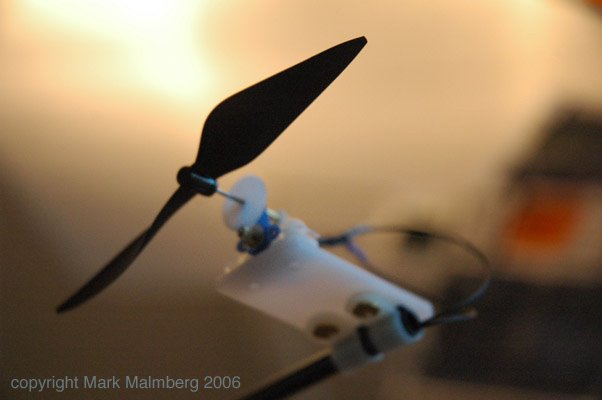
The propulsion on the lightweight unit is via a 6mm pager motor with gear reduction. For scale, the black tube that is the spine of this and used in the framework of the larger piece, is carbon fiber in the same diameter as a soda straw.
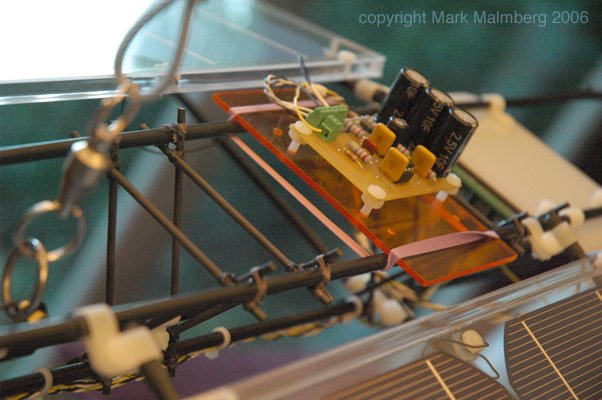
This is the power supply I designed; it stores electrons from the solar cells in the three black capacitors. Please excuse the temporary rubber bands...

The computer monitors the voltage in the capacitors.
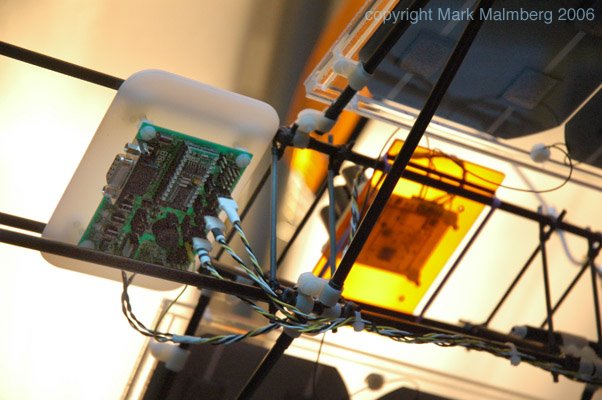
When enough juice is accumulated, it generates new position values and directs the servos to rotate to their new orientation, then turns on the motor with the propeller, and then goes back into charge mode while the mobile zooms around.
<< Home